|
|
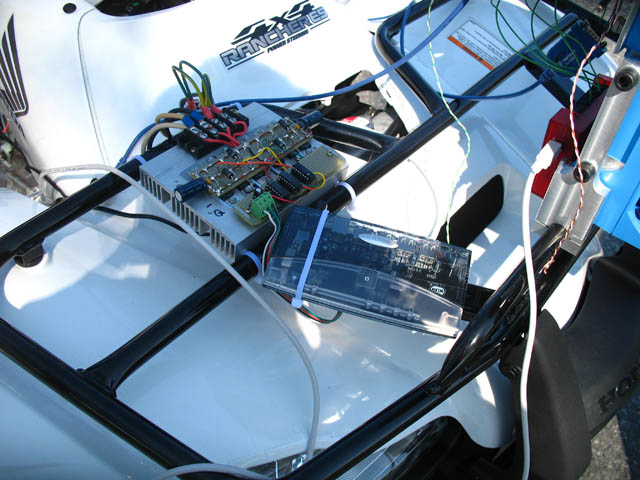
Phase 1UNC Charlotte is working on an autonomous All Terrain Vehicle (ATV) that can sense its environment and traverse most any terrain. It will follow a pre-defined path pulling a trailer that has sensing equipment. Phase 1 is to build the mechanical and electrical systems to allow someone to drive the vehicle like an RC car (later we will replace the RC controller with computer control). It is an off-the-shelf Honda ATV. We collected Video, LIDAR and GPS data as well which we will integrate later. As you can see from the video, it works!
Other Photos:
|
 |
Phase 2The next phase will be to add computer control of the vehicle and have it drive autonomously based on a set of stored GPS waypoints. |
Phase 3Phase 3 is to have the vehicle run autonomously and avoid obstacles using LIDAR and other sensors. |
|
Phase 4Phase 4 is to have the vehicle autonomously traverse a specific bounded area and map its environment. |
|
Phase 5In phase 5 the vehicle will follow a pre-defined path pulling a trailer that has sensing equipment. |

 Autonomous Robotic ATV - Phase 1 - "RC vehicle"
Autonomous Robotic ATV - Phase 1 - "RC vehicle" Autonomous Robotic ATV - Phase 1 - "RC vehicle"
Autonomous Robotic ATV - Phase 1 - "RC vehicle"